Patient Evaluation during Stroke Rehabilitation
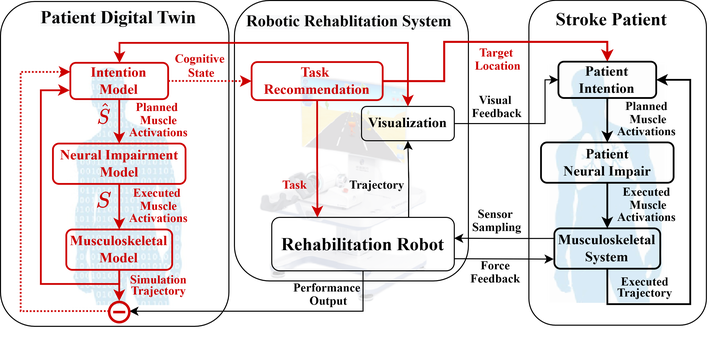
Stroke rehabilitation helps patients to regain motor control which was lost due to damages in the brain. Robotic stroke rehabilitation can reduce the burdens of the therapists and increase rehabilitation efficiency. Our team builds digital twins of the patient based on neuromusculoskeletal models. Motion trajectories and corresponding forces collected by rehabilitation robots are used for inferring possible muscle activation sequences, which can provide qualitatively and quantitatively evaluation of the patients’ dynamic and static motor control. The system can then suggest new motion targets that can further reduce uncertainties and improve the effectiveness of rehabilitations.
Zhihao Jiang
Assistant Professor
Zhihao Jiang is the director of Human-Cyber-Physical Systems Lab at ShanghaiTech University.
Yilun Chen
Alumni
Yilun Chen graduated from ShanghaiTech University and is now with Pinduoduo.
Junyu Diao
Alumni
Junyu Diao graduated from ShanghaiTech University and is now with Shengqu Games.
Wentao Wang
M.S. Candidate
Wentao Wang is a Computer Science undergraduate student Class 2019 at ShanghaiTech University.